仿生多关节蛇形机器人由于其无肢结构和高灵活性,具有较强的地形适应性。然而,典型的多关节蛇形机器人由数十个电机单元组成,这导致了机器人体积庞大、结构沉重以及高达数百瓦的高功耗。本文提出了一种关节可重定位、内无线的蛇形机器人,采用低功耗欠驱动机制实现类似多关节的运动。该蛇形机器人由一系列柔性被动连接构成,能够通过沿机器人内部的齿条齿轮重新定位电机驱动的关节单元,从而动态改变其关节耦合配置。此外,柔性机器人皮肤无线供电内部关节单元,避免了由可移动关节单元引起的电线缠绕和断开风险。关节可重定位机制与无线充电柔性皮肤的结合,不仅实现了较高的弯曲度,还具有1.3公斤的轻量化结构和7.6瓦的能效无线电力传输。翻译而来供参考,亦可加入知识星球阅读英文原版、中文译本(方式见文末),查看更多非公开资料。

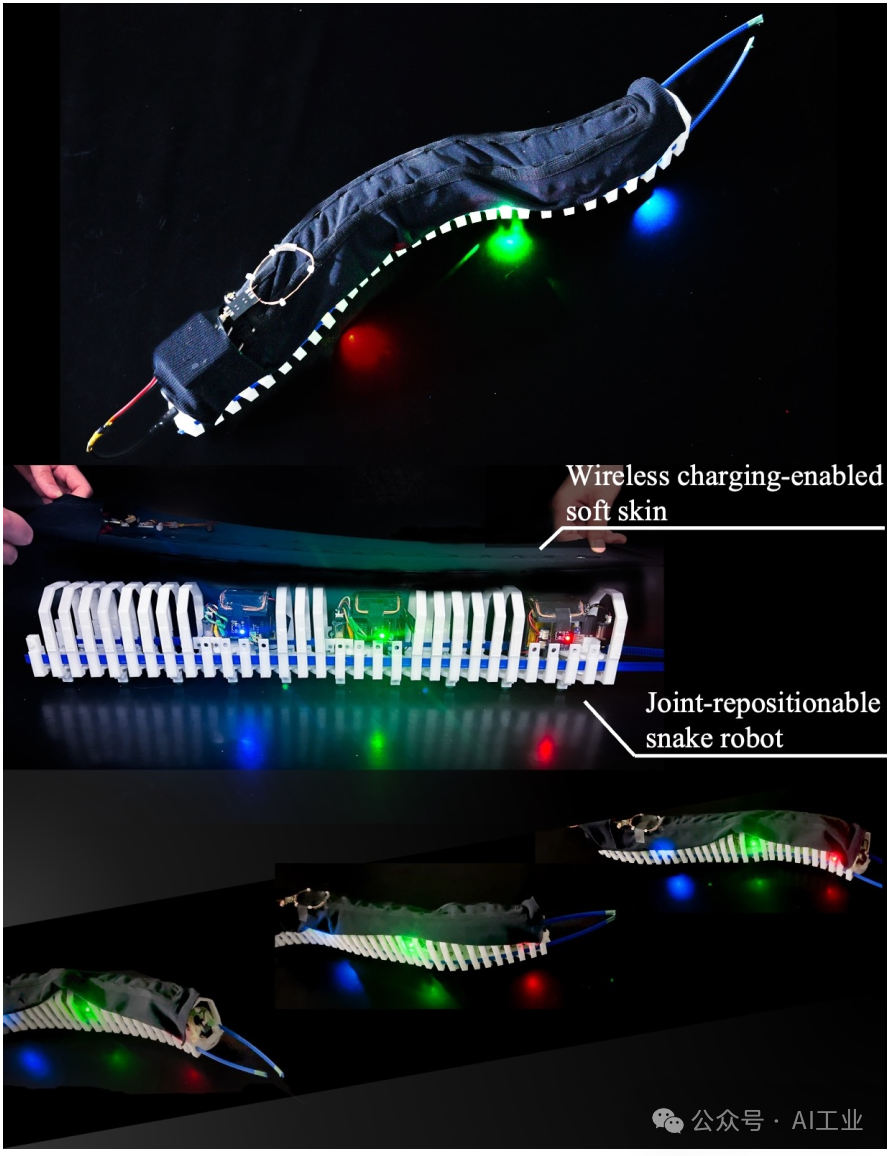
图1. 关节可重定位内无线平面蛇形机器人概念,能够展示类似多关节的运动,同时保持低功耗和轻量化结构。机器人内部的关节可重定位单元可以自由移动,构建各种关节耦合方式。单元通过柔性机器人皮肤进行无线供电。
生物蛇类通过适应性地弯曲其柔性体躯,利用高自由度在崎岖地形中获得了卓越的运动能力 [1], [2]。受自然界蛇类启发的多关节蛇形机器人在受限和非结构化环境中的地形适应性,相比轮式或腿式机器人,展现了更广泛的优势 [3]。尽管蛇形机器人具备适应性运动能力,但实现高效、持续的运动仍然是一个挑战。基于一系列由数十个电机驱动的关节组成的多关节机械设计,由于电机小型化的挑战,导致机器人结构沉重、功耗高达数百瓦 [4], [5]。在轻量化、能效高的蛇形机器人开发中,之前的研究主要集中于欠驱动关节系统,例如通过电缆驱动的关节弯曲或气动软驱动关节的技术 [6]–[8]。然而,与多关节系统相比,电缆和气动舱的设计限制了机器人姿态的多样性。为了填补这一空白,本文提出了一种新型的欠驱动蛇形机器人——关节可重定位的内无线蛇形机器人。与典型的由多个电机单元和刚性连接组成的固定关节耦合结构不同,我们引入了一种关节可重定位设计,通过沿内部柔性齿条移动至少两个关节单元,动态地改变关节耦合配置。我们的数学模型和物理蛇形机器人实验表明,关节可重定位机制能够实现两种基本的蛇形运动方式,类似于传统的多关节蛇形机器人。此外,机器人顶部安装了一种柔性机器人皮肤,其中包括支持无线充电的线圈,防止内部电源电缆与可移动关节单元发生缠绕。优化后的线圈设计通过实验验证了具有50%以上效率的瓦特级无线电力传输,同时避免了与关节中的金属电机产生电磁干扰。总体而言,关节可重定位机制通过柔性机器人皮肤进行无线供电,在保持1.3公斤轻量设计的同时,通过7.6瓦无线充电实现高效能量利用,并能够进行类似传统多关节蛇形机器人的基本蛇形运动(见图1)。图2. 关节可重定位、内无线平面蛇形机器人的设计与操作。(a) 关节可重定位蛇形机器人的示意图,包括可重定位关节单元和固定关节单元。(b) 关节单元组件的详细视图,包括带编码器的直流电机、柔性齿条齿轮和轮子。关节单元类型分为可重定位和固定类型,图中展示了移动和弯曲的基本操作。(c) 两种适应不同环境的运动策略:无关节位置的蛇形运动,适用于无障碍、狭窄地形;基于关节位置的障碍辅助运动。关节可重定位机制由一个外骨骼体、两个通过连接链接的柔性齿条和N个沿机器人主体移动的电机驱动关节单元组成(见图2a,N = 3的情况)。链接通过铰接关节连接,其中一些链接底部装有被动轮,以提供摩擦各向异性。两个齿条穿过每个链接的凹槽,其前端固定在第一个链接上,后端则保持自由。在N个关节单元中,N-1个是可移动关节单元,1个是固定关节单元。可移动关节单元由两个电机组成,沿机器人主体移动,而固定关节单元则由一个电机固定在机器人后端。两个关节单元的机械设计和基本操作如图2b所示。重新定位的关节单元中的两个电机主要控制机器人的运动。当电机旋转方向相同时,一个齿条向前移动,另一个向后移动,产生S形弯曲。相反,当电机反向旋转时,移动单元沿齿条来回移动。两个与电机连接的主动齿轮将电机的旋转力传递到齿条,而被动齿轮则用于钩住移动单元。固定关节单元仅支持弯曲,使用单个电机同步旋转两个柔性齿条。根据其基本操作,我们的机器人提供了两种运动方式(见图2c)。第一种方式是关节位置自由的蛇形运动,能够平稳地在无障碍的狭窄地形中移动。这种运动方式消除了对精确关节定位的需求,从而减少了操作时间。第二种方式是基于关节位置的障碍物辅助运动,在地形中慢慢爬过周围的障碍物。适应性关节定位对于让机器人适应C形障碍物是必要的。详细的控制策略在§ III中进行描述。总体而言,关节可重定位设计使得机器人能够实现蛇形运动,同时大幅减少了所需电机的数量。为了实现关节可重定位结构,移动关节单元必须轻便、紧凑,并且能够自由移动。虽然在关节单元中配备小型电池可以实现无缆和快速运动,但这会减少操作时间。相反,使用电源电缆将关节单元与外部电源连接,可能会因关节的移动导致电缆缠绕或断裂。为了克服这一挑战,我们采用了一种无线电力传输方法,实现了移动关节单元的持续、无缆操作。具体来说,与基于电磁波和电容耦合的其他无线充电方法相比,基于线圈的感应充电可以高效地传输瓦级电力 [9]–[11]。通过从外部电源模块(即机器人皮肤)到关节单元的感应电力传输,配备小型电池的关节单元能够持续运行,而不受电池容量的限制。图3. 无线充电支持的软体机器人皮肤设计概述。(a) 软体机器人皮肤的电路图。(b) 软体机器人皮肤模型的模拟感应场。(c) 软体机器人皮肤几何形状的功率传输效率。(d) 由液态金属基发射线圈组成的软体机器人皮肤照片。(e) 与RX线圈连接的关节单元照片。(f) 软体机器人皮肤的制造过程。图3a展示了支持无线充电的柔性机器人皮肤的电路设计。该皮肤包括一个连接到6.78 MHz电源模块的发射器(TX)螺旋线圈,以及三个接收器(RX)螺旋线圈,每个接收器连接到一个关节单元。通过TX/RX线圈之间的感应耦合,TX线圈无线传输交流电力到RX线圈,RX线圈通过全桥整流器将接收到的交流电转换为直流电,并通过DC-DC转换器和电池管理器将能量储存在电池中。优化螺旋线圈的尺寸至关重要,因为蛇形机器人内部的金属电机可能与感应场发生相互作用。螺旋线圈的无线电力传输距离主要受其较短边长(即宽度)的影响。为了了解线圈宽度与最大功率传输效率之间的关系 [12],我们进行了电磁模拟(FEKO,HyperWorks)。模拟模型包括:i) 一根长度为55厘米,2圈,导电率为3.4×10^7 S/m的螺旋TX线圈,ii) 一个4厘米 × 4厘米,4圈的RX线圈,以及 iii) 简化的立方体不锈钢电机单元。TX/RX线圈与RX线圈/电机之间的距离分别为1厘米和0.5厘米,TX线圈的宽度从2厘米到8厘米,间隔为1厘米(见图3b)。模拟结果表明,较宽的线圈与电机相互作用,而较窄的线圈无法向RX线圈传递强感应场(见图3c)。因此,为了实现高效的功率传输,选择了4厘米宽度的线圈。图3d和图3e展示了支持无线充电的柔性皮肤原型,包含液态金属基织物TX线圈和关节可重定位机制,其中包括RX线圈。总长为0.45米的关节可重定位机制包括40个带有被动轮的3D打印被动连接件、两个柔性齿条和三个关节单元。关节单元配备了直流电机(1000:1电机,Pololu)和磁编码器(3499,Pololu)。该编码器用于测量电机驱动的柔性齿条的移动长度。TX线圈采用液态金属基拉伸管,与设计具有弹性的织物结合,由机器编织机(MACH2XS 15S,Shima Seiki)制造,类似于[13],[14]的做法(见图3f)。选择Galinstan(Ga68.5In21.5Sn10,四川HPM)作为液态金属,其具有低熔点(-19°C)、高电导率(3.5 × 10^7 S/m)和低毒性 [15]。Galinstan被装入内外径为2/3毫米的硅胶管中。电源模块包括6.78 MHz的D类放大器(EPC9065)、DC移动电池(22.5 W Anker Nano Power Bank)和一个具有9V输出的USB PD电缆。相比之下,4厘米 × 4厘米的RX线圈由直径为0.5厘米的4圈铜线组成,包含一个全桥整流器(PMEG6010)、一个DC-to-DC整流器(MIC29150-5.0)和一个电池管理器(Lipo Rider Plus)。TX/RX线圈的谐振频率调整为6.78 MHz,并使用分布式芯片电容器(CTX,CRX)进行调谐 [16],[17]。TX/RX线圈在6.78 MHz下的电感(LTX,LRX)、电阻(RTX,RRX)和品质因子(Q-factor = ωL/R)分别为2.5/2.1 µH,1.5/0.7 Ω和70/120。该原型的总重量和平均功耗分别为1.3千克(包括带电池的皮肤:0.3千克)和1.2瓦特。柔性皮肤通过7.6瓦DC输入无线向每个关节单元传输1.2瓦特的DC功率(即5.0V × 0.24A)。图4. 可变长度弧形关节模型示意图。我们的机器人由N个关节单元组成,表示为具有均匀曲率的弧段序列。电机的旋转运动(d)改变了每个弧段的长度(L)和角度(θ)。本节描述了我们蛇形机器人的广义运动学模型,称为变长弧形关节模型。我们的关节可重定位蛇形机器人被建模为一系列具有可变长度的弧段。在这里,我们根据关节单元中的电机旋转来估计可重定位关节的位置和角度。首先,我们假设由N-1个可重定位关节单元和1个固定关节单元组成的关节模型可以被划分为N个弧段。注意,第一个弧段仅由第1个关节单元分隔。基于分段常曲率假设,每个弧段简化为具有恒定曲率的圆弧,从而简化了机器人的形状的数学建模。具体来说,第i个弧段(i = 1, 2, …, N)位于(i-1)-th和i-th关节单元之间,可以通过三个长度来建模(中心线:Li,左侧线:l2i−1,右侧线:l2i)以及弧角度θi(见图4)。第i个可重定位关节单元具有两个电机,分别为(2i-1)-th和2i-th电机。为了简化,假设第N个固定关节单元由(2N-1)-th和2N-th电机组成,这两个电机同步旋转,且方向与实际电机相反。通过这种设置,Li,l2i−1,l2i和θi可以通过机器人宽度h表达如下:其中,Lall 是机器人中心线的总长度,它是恒定的。接下来,我们建模由第i段中的电机引起的Li变化。我们假设机器人初始形状是直的,且电机单元均匀地排列。在此初始配置下,每个齿条的长度假设为Lall/N。第(2i − 1)-th和2i-th电机的旋转分别使l2i−1和l2i的长度分别增加d2i−1和d2i。由于2i − 1和2i-th电机也改变了第(i + 1)-th段的长度,因此l2i−1和l2i可以通过Lall、N和d来表达如下:其中,d−1 = d0 := 0,且d2N−1 = d2N。请注意,电机的逆时针旋转定义为正d。因此,d2i−3 · · · d2i的转换为Li和θi可以通过以下方程式表达,参见方程1和方程2:方程4显示了机器人配置(L和θ)转换为电机驱动参数(d)的过程。图5. 使用可变长度弧形关节模型的运动控制策略。(a) 沿着蓝色的蛇形曲线进行的关节位置自由的蛇形运动示意图。(b) 基于关节位置的障碍辅助运动示意图,突出显示橙色的反作用力。当固定形状遇到障碍物时,产生的反作用力推动机器人前进,同时保持蓝色的形状。在蛇类的各种陆地运动模式中,平面蛇形机器人主要采用蛇形运动和障碍辅助运动(见图5)。蛇形运动使蛇形机器人能够通过沿着像蛇形曲线这样的弯曲路径弯曲整个身体,从而在狭窄的地形中平稳移动[18]。相比之下,障碍辅助运动则使蛇形机器人能够推抵地形不规则性和狭窄通道的墙壁[19]。与已经建立的固定长度弧形关节模型[20]–[22]不同,目前尚未为可变长度弧形关节模型开发出控制方法。首先,我们讨论如何通过变长弧形关节模型来逼近蛇形运动,正如在第III-A节中所解释的那样。蛇形运动基本上遵循蛇形曲线,其曲率κ呈正弦变化。κ可以表达如下:其中,t是时间,ω是角频率,s是沿曲线的距离,lserp是曲线四分之一长度,α(t, s)是沿曲线的绕角。请注意,α0表示α(0, 0)。由于蛇形曲线可以通过一系列圆弧段来逼近[21],我们通过我们的可变长度弧形关节模型来近似蛇形曲线,如下所示:首先,将蛇形曲线分为N个弧段,每个弧段的长度为Li。然后,可以通过l = Lall/4和方程5来计算弧角θi:其中,P0 j=1 Lj := 0。最后,根据方程4,我们计算从弧段#1到目标蛇形曲线的θ和L的d值,以适配N个弧段。蛇形曲线的N个弧段分段是灵活的,从而使得所提出的蛇形机器人能够执行无关节位置的蛇形运动,且具有不同的分段方式。请注意,过长的分段弧会导致显著的拟合误差。公式7使得该机器人能够在障碍物丰富的环境中平滑地改变形状并向前推进。然而,该机器人无法持续进行这种运动,因为它依赖于关节单元的位置。当单元到达身体的后端时,必须将它们重置到前端才能恢复推进。图6. 机器人皮肤的无线充电能力。测量了交流到交流的功率传输效率,针对以下情况:(a) TX/RX线圈之间的不同距离,(b) 蛇形弯曲姿态,以及(c) 不同周围环境下的性能。首先,我们通过测量TX/RX线圈之间的距离、蛇形弯曲姿势和不同的周围环境来研究机器人皮肤的无线充电能力,具体测量的是AC到AC的功率传输效率。效率是根据从矢量网络分析仪(PicoVNA108)获得的测量S参数计算的 [12]。图6a展示了在TX/RX线圈之间距离从0.5 cm到2.0 cm(以0.5 cm为步长)变化时,是否有关节单元的效率。结果表明,无论是否有关节单元,效率几乎相同,说明TX线圈避免了与关节单元中金属电机的电磁干扰。此外,较短的距离表现出较高的效率。因此,选择1 cm的距离,以避免RX线圈与机器人皮肤发生碰撞,同时保持约60%的高效率。接着,图6b展示了两种弯曲姿势下的效率:S形和C形,弯曲半径从3 cm到9 cm(以3 cm为步长)以及一条直线。效率显示对于不同的S形或C形弯曲半径,效率均超过50%,这是由于TX线圈的相对低Q值 [13]。因此,关节单元在弯曲过程中能够稳定接收W级功率。最后,图6c展示了不同的周围环境下的效率,包括非金属(如木材、水)和金属环境。结果显示,除了当金属物体位于TX线圈上方时,会对附近的金属物体产生显著的电磁干扰,效率几乎相同。将铁磁材料片附加在机器人皮肤上方可以减轻效率下降或电磁相互作用 [10]。图7. 基于仿真的蛇形运动精度测量。(a) 使用可变长度弧形关节模型测量serpenoid曲线的RMSE的仿真协议。(b) 在改变段数N时,机器人曲线与serpenoid曲线之间的RMSE。(c) 使用不同关节数的可变长度弧形关节模型对目标serpenoid曲线的拟合结果。接下来,我们评估了所提议机器人的运动精度。在第III-B节所述的控制方案下,图7展示了应用于蛇形曲线的变长弧形关节模型的拟合误差仿真结果。我们将机器人总长度设置为60 cm,弧段数量从2到5变化。每个段的长度范围从2到58 cm。如图7a所示,蛇形曲线(l: 15 cm,α0: 0.7 rad)被修剪以匹配机器人的长度,并且沿着机器人和曲线等间隔地绘制了一系列点。我们计算了这些点之间的均方根误差(RMSE)来量化偏差。图7b和图7c分别展示了弯曲段数从2到5的RMSE和拟合模式。随着关节数量的减少,RMSE增大,因为较少的关节会导致非常长的弧段,从而使蛇形段的拟合误差较大。当关节数为2时,弧形模型无法跟随蛇形,但当关节数大于3时,可以实现近似的拟合精度。考虑到拟合精度和电机数量之间的权衡,我们选择了3个关节单元进行原型实现。图8. 两种运动控制策略的演示。(a) 无关节位置的蛇形运动的时间推移。机器人在三种不同关节长度的情况下,速度几乎相同。(b) 基于关节位置的障碍辅助运动。机器人根据被蓝色线条包围的一个段与三个圆柱形障碍物之间的反作用力推动前进。最后,我们展示了两种运动方式作为概念验证。图8a展示了利用我们原型的无关节位置蛇形运动。基于第III-B节所述的控制方法,具有不同段长度的蛇形机器人沿着蛇形曲线(l = 15 cm,α0 = 0.70 rad)运动,达到了相对较快的速度(2.25 ± 0.05)cm/s。需要注意的是,当每个段的长度没有发生显著变化时,机器人的速度保持几乎不变。此外,图8b展示了基于关节位置的障碍辅助运动。该原型被放置在一个充满障碍物的环境中,环境中有三个固定的圆柱形障碍物。按照第III-C节所述的控制方法,机器人以0.76 cm/s的较慢速度运动,同时保持与三个障碍物接触的段形状。本文介绍了一种具有关节可重定位和内部无线功能的蛇形机器人,能够执行多关节、轻量级、低功耗的运动。可重定位的关节单元使得该机器人能够实现欠驱动的多关节弯曲,此外,内置无线充电的机器人皮肤能够持续为可重定位的关节单元供电。我们研究了控制机制和无线充电能力下的运动性能,展示了具备无线充电能力(7.6 W)的关节可重定位运动。我们当前的原型仍存在一些局限性。首先,我们当前的蛇形机器人仅支持两种类型的平面运动,而之前的蛇形机器人已展示了多种运动模式,能够在三维异构地形中导航。为了解决这个问题,未来的研究将重点关注三个关键方面:机制、控制和传感。从机械角度看,机器人机制仅限于平面弯曲。实现多方向弯曲将使机器人能够实现三维运动。 从控制角度看,目前的控制策略仅支持简单的运动,要求机器人在受控环境中操作。深度强化学习(如从仿真到现实)能够为真实环境提供动态控制策略。在传感方面,机器人缺乏检测外部力量引起的形状变形的能力。将传感器集成到机器人皮肤中可以提高其对复杂地形的适应性。我们坚信,具有关节可重定位和内置无线功能的蛇形机器人将在未来成为更加实用和高效的机器人探索者。