
人体皮肤能够在大面积表面上稳定捕获各类多模态数据,同时提供柔软的接触界面。尽管采用微机电系统(MEMS)的人工技术可模拟这些生物功能,但在制造工艺、软刚性界面引发的分层问题以及电子干扰等方面仍面临诸多挑战。为解决这些难题,英国剑桥大学 Fumlya Iida 团队提出了一种以明胶为主要基材的的高灵敏度水凝胶膜,用做单层多模态传感皮肤。借助电阻抗断层扫描技术,该传感皮肤可实现多达 863,040 条跨膜传导通路的信号采集,能够识别至少六种不同类型的多模态刺激,包括人体接触、机械损伤、多点绝缘按压及局部加热等。
研究人员利用数据驱动技术,对这些通路产生的高度冗余且相互耦合的传感信息进行整合分析,筛选出需要重点监测的通路,实现了高效的多模态感知。为了展示该方法的多功能性,他们将水凝胶铸造成成人手掌的形状和大小。借助信息结构化策略,这款仿生手成功实现了环境条件预测、人体触摸定位以及本体感觉数据生成等功能。该研究框架解决了多模态软传感领域中物理提取有效信息的技术挑战,为敏感系统中单层蒙皮的信息主导型设计开辟了新方向
软感皮肤的多模态信息结构
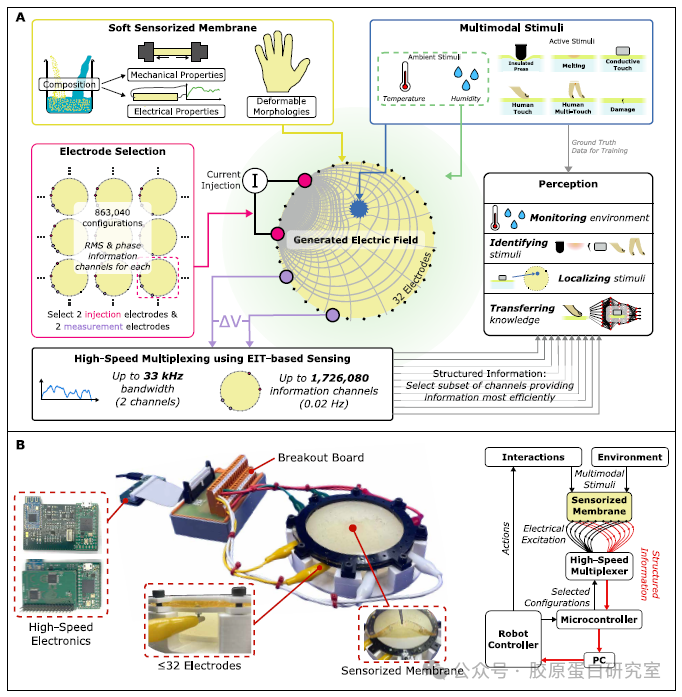
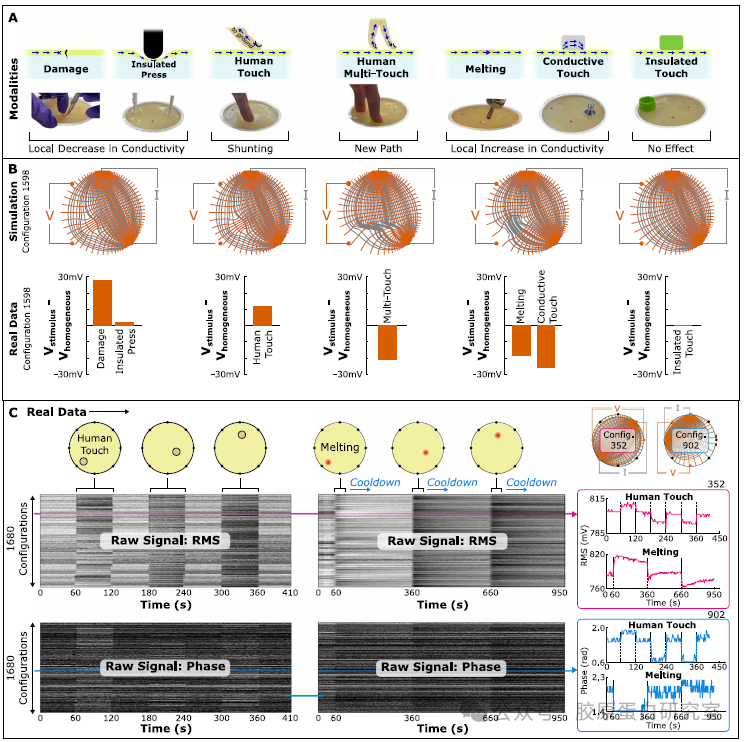
水凝胶膜的具体材料组成及配比为:明胶粉末、水、甘油、柠檬酸一水合物按 1 : 1.5 : 1.5 : 0.2 的质量比混合,在 50 °C 的烤箱中均质化 48 小时,期间按明胶粉末与盐1:0.1 的质量比添加盐。所得水凝胶具有低成本、可拉伸、压阻应变响应等特性,能够监测环境温度和湿度,其电学和机械性能可通过成分进行调节,以适应特定应用设计。为了监测仿生皮肤的多模态相互作用,在其周边安排了多个电极。将电极注入交流电以产生电场穿过膜,然后测量其他电极之间产生的电压差。多模态刺激通过各种机制引起电场变化,这些变化被外周电极记录下来。通过仔细选择用于监测皮肤的电极配置,系统的输出信息可以被结构化,以有效地返回模态和特定应用的数据。
利用产生的电场检测多模态刺激
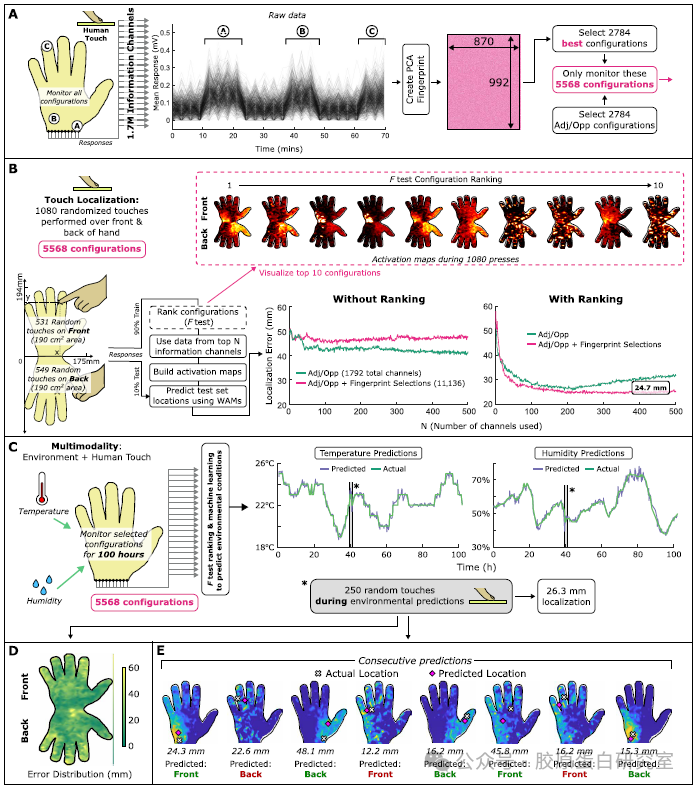
通过数据驱动方法优化信息通道选择,在单层水凝胶制成的 3D 手模型上实现多模态刺激预测(包括触觉定位和环境监测)。在 3D 手模型上,即使刺激位置远离电极(如指尖),系统仍能通过 1726080 个信息通道检测到原始触觉响应。这证明了高密度 EIT 技术在复杂形状上的可行性。另外,通过训练神经网络预测环境温度与湿度,在触觉实验中同步输出高精度结果。经多模态数据处理(触觉与温湿度同步)后,凸显系统在真实场景的性能。
构建信息以预测3D手部的多模态刺激
通过单层水凝胶皮肤和高密度 EIT,该研究提出了一种高效的多模态信息结构化框架,解决了软体机器人感知的核心挑战。用数据驱动的“信息导向设计”,避免了传统传感的制造复杂性,为软体机器人、假肢和可穿戴设备开辟了新路径。
参考文献:
Hardman D, Thuruthel T G, Iida F. Multimodal information structuring with single-layer soft skins and high-density electrical impedance tomography[J]. Science Robotics, 2025, 10(103): eadq2303.
DOI: 10.1126/scirobotics.adq2303
人体皮肤能够在大面积表面上稳定捕获各类多模态数据,同时提供柔软的接触界面。尽管采用微机电系统(MEMS)的人工技术可模拟这些生物功能,但在制造工艺、软刚性界面引发的分层问题以及电子干扰等方面仍面临诸多挑战。为解决这些难题,英国剑桥大学 Fumlya Iida 团队提出了一种以明胶为主要基材的的高灵敏度水凝胶膜,用做单层多模态传感皮肤。借助电阻抗断层扫描技术,该传感皮肤可实现多达 863,040 条跨膜传导通路的信号采集,能够识别至少六种不同类型的多模态刺激,包括人体接触、机械损伤、多点绝缘按压及局部加热等。
研究人员利用数据驱动技术,对这些通路产生的高度冗余且相互耦合的传感信息进行整合分析,筛选出需要重点监测的通路,实现了高效的多模态感知。为了展示该方法的多功能性,他们将水凝胶铸造成成人手掌的形状和大小。借助信息结构化策略,这款仿生手成功实现了环境条件预测、人体触摸定位以及本体感觉数据生成等功能。该研究框架解决了多模态软传感领域中物理提取有效信息的技术挑战,为敏感系统中单层蒙皮的信息主导型设计开辟了新方向
软感皮肤的多模态信息结构
水凝胶膜的具体材料组成及配比为:明胶粉末、水、甘油、柠檬酸一水合物按 1 : 1.5 : 1.5 : 0.2 的质量比混合,在 50 °C 的烤箱中均质化 48 小时,期间按明胶粉末与盐1:0.1 的质量比添加盐。所得水凝胶具有低成本、可拉伸、压阻应变响应等特性,能够监测环境温度和湿度,其电学和机械性能可通过成分进行调节,以适应特定应用设计。为了监测仿生皮肤的多模态相互作用,在其周边安排了多个电极。将电极注入交流电以产生电场穿过膜,然后测量其他电极之间产生的电压差。多模态刺激通过各种机制引起电场变化,这些变化被外周电极记录下来。通过仔细选择用于监测皮肤的电极配置,系统的输出信息可以被结构化,以有效地返回模态和特定应用的数据。
利用产生的电场检测多模态刺激
通过数据驱动方法优化信息通道选择,在单层水凝胶制成的 3D 手模型上实现多模态刺激预测(包括触觉定位和环境监测)。在 3D 手模型上,即使刺激位置远离电极(如指尖),系统仍能通过 1726080 个信息通道检测到原始触觉响应。这证明了高密度 EIT 技术在复杂形状上的可行性。另外,通过训练神经网络预测环境温度与湿度,在触觉实验中同步输出高精度结果。经多模态数据处理(触觉与温湿度同步)后,凸显系统在真实场景的性能。
构建信息以预测3D手部的多模态刺激
通过单层水凝胶皮肤和高密度 EIT,该研究提出了一种高效的多模态信息结构化框架,解决了软体机器人感知的核心挑战。用数据驱动的“信息导向设计”,避免了传统传感的制造复杂性,为软体机器人、假肢和可穿戴设备开辟了新路径。
参考文献:
Hardman D, Thuruthel T G, Iida F. Multimodal information structuring with single-layer soft skins and high-density electrical impedance tomography[J]. Science Robotics, 2025, 10(103): eadq2303.
DOI: 10.1126/scirobotics.adq2303